An Overview Of C++26: The Library – Math
The most interesting feature of the new C++26 standard library is its improved math support.
std::submdspan
std::submdspan is s a subspan of an existing span std::mdspan (C++23). The subspan didn’t make it into C++23 and was added with C++26.
Before I continue with C++26, I must make a short detour to C++23. hi
std::mdspan
A std::mdspan is a non-owning multidimensional view of a contiguous sequence of objects. The contiguous sequence of objects can be a plain C-array, a pointer with a size, a std::array, a std::vector, or a std::string. Often, this multidimensional view is called a multidimensional array.
The number of dimensions and the size of each dimension determine the shape of the multidimensional array. The number of dimensions is called rank, and the size of each dimension extension. The size of the std::mdspan is the product of all dimensions that are not 0. You can access the elements of a std::mdspan using the multidimensional index operator [].
Each dimension of a std::mdspan can have a static or dynamic extent. static extent means that its length is specified at compile time; dynamic extent means that its length is specified at run time.
Thanks to class template argument deduction (CTAG) in C++17, the compiler can often automatically deduce the template arguments from the types of initializers:
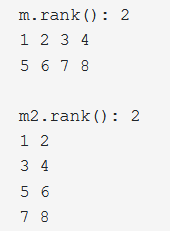
// mdspan.cpp #include <mdspan> #include <iostream> #include <vector> int main() { std::vector myVec{1, 2, 3, 4, 5, 6, 7, 8}; // (1) std::mdspan m{myVec.data(), 2, 4}; // (2) std::cout << "m.rank(): " << m.rank() << '\n'; // (4) for (std::size_t i = 0; i < m.extent(0); ++i) { // (6) for (std::size_t j = 0; j < m.extent(1); ++j) { // (7) std::cout << m[i, j] << ' '; // (8) } std::cout << '\n'; } std::cout << '\n'; std::mdspan m2{myVec.data(), 4, 2}; // (3) std::cout << "m2.rank(): " << m2.rank() << '\n'; // (5) for (std::size_t i = 0; i < m2.extent(0); ++i) { for (std::size_t j = 0; j < m2.extent(1); ++j) { std::cout << m2[i, j] << ' '; } std::cout << '\n'; } }
I apply class template argument deduction three times in this example. Line (1) uses it for a std::vector, and lines (2) and (3) for a std::mdspan. The first 2-dimensional array m has a shape of (2, 4), the second one m2 a shape of (4, 2). Lines (4) and (5) display the ranks of both std::mdspan. Thanks to the extent of each dimension (lines 6 and 7) and the index operator in line (8), it is straightforward to iterate through multidimensional arrays.
Here ends my detour, and I continue with std::submdspan.
std::submdspan
This function was considered critical for the overall functionality of mdspan. However, due to review time constraints, it was removed in order for mdspan to be included in C++23.
 Modernes C++ Mentoring
Modernes C++ Mentoring
Do you want to stay informed: Subscribe.
Creating a std::submdspan is straightforward. Its first parameter is an mdspan x, and the remaining x.rank() parameters are slice specifiers, one for each dimension of x. The slice specifiers describe which elements of the range [0,x.extent(d)) are part of the multidimensional index space of the returned mdspan.
This leads to the following fundamental signature:
template<class T, class E, class L, class A,
class ... SliceArgs)
auto submdspan(mdspan<T,E,L,A> x, SliceArgs ... args);where E.rank() must be equal to sizeof...(SliceArgs).
Proposal P2630R4 provides, in addition to the definition of a std::submdspan, a few examples for a rank-1 mdspan.
int* ptr = ...; int N = ...; mdspan a(ptr, N); // subspan of a single element auto a_sub1 = submdspan(a, 1); static_assert(decltype(a_sub1)::rank() == 0); assert(&a_sub1() == &a(1)); // subrange auto a_sub2 = submdspan(a, tuple{1, 4}); static_assert(decltype(a_sub2)::rank() == 1); assert(&a_sub2(0) == &a(1)); assert(a_sub2.extent(0) == 3); // subrange with stride auto a_sub3 = submdspan(a, strided_slice{1, 7, 2}); static_assert(decltype(a_sub3)::rank() == 1); assert(&a_sub3(0) == &a(1)); assert(&a_sub3(3) == &a(7)); assert(a_sub3.extent(0) == 4); // full range auto a_sub4 = submdspan(a, full_extent); static_assert(decltype(a_sub4)::rank() == 1); assert(a_sub4(0) == a(0)); assert(a_sub4.extent(0) == a.extent(0));
The same rules apply to the multi-dimensional use case.
int* ptr = ...; int N0 = ..., N1 = ..., N2 = ..., N3 = ..., N4 = ...; mdspan a(ptr, N0, N1, N2, N3, N4); auto a_sub = submdspan(a,full_extent_t(), 3, strided_slice{2,N2-5, 2}, 4, tuple{3, N5-5}); // two integral specifiers so the rank is reduced by 2 static_assert(decltype(a_sub) == 3); // 1st dimension is taking the whole extent assert(a_sub.extent(0) == a.extent(0)); // the new 2nd dimension corresponds to the old 3rd dimension assert(a_sub.extent(1) == (a.extent(2) - 5)/2); assert(a_sub.stride(1) == a.stride(2)*2); // the new 3rd dimension corresponds to the old 5th dimension assert(a_sub.extent(2) == a.extent(4)-8); assert(&a_sub(1,5,7) == &a(1, 3, 2+5*2, 4, 3+7));
This is not the end of the support is C++26.
<linalg>:
<linalg> is a free function linear algebra interface based on the BLAS.
BLAS: Basic Linear Algebra Subprograms (BLAS) is a specification that prescribes a set of low-level routines for performing common linear algebra operations such as vector addition, scalar multiplication, dot products, linear combinations, and matrix multiplication. They are the de facto standard low-level routines for linear algebra libraries … .(https://en.wikipedia.org/wiki/Basic_Linear_Algebra_Subprograms)
Proposal P1673R13 proposes a C++ Standard Library dense linear algebra interface based on the dense Basic Linear Algebra Subroutines (BLAS). This corresponds to a subset of the BLAS Standard.
This linear algebra was long missed in the C++ community. According to the proposal the following code snippet is the hello world of linear algebra. It scales the elements of a 1-D mdspan by a constant factor, first sequentially, then in parallel.
constexpr size_t N = 40; std::vector<double> x_vec(N); mdspan x(x_vec.data(), N); for(size_t i = 0; i < N; ++i) { x[i] = double(i); } linalg::scale(2.0, x); // x = 2.0 * x linalg::scale(std::execution::par_unseq, 3.0, x); for(size_t i = 0; i < N; ++i) { assert(x[i] == 6.0 * double(i)); }
What’s next?
I’m still not done with C++26. In my next post, I will write about saturation arithmetic and the concurrency support of C++26.
Thanks a lot to my Patreon Supporters: Matt Braun, Roman Postanciuc, Tobias Zindl, G Prvulovic, Reinhold Dröge, Abernitzke, Frank Grimm, Sakib, Broeserl, António Pina, Sergey Agafyin, Андрей Бурмистров, Jake, GS, Lawton Shoemake, Jozo Leko, John Breland, Venkat Nandam, Jose Francisco, Douglas Tinkham, Kuchlong Kuchlong, Robert Blanch, Truels Wissneth, Mario Luoni, Friedrich Huber, lennonli, Pramod Tikare Muralidhara, Peter Ware, Daniel Hufschläger, Alessandro Pezzato, Bob Perry, Satish Vangipuram, Andi Ireland, Richard Ohnemus, Michael Dunsky, Leo Goodstadt, John Wiederhirn, Yacob Cohen-Arazi, Florian Tischler, Robin Furness, Michael Young, Holger Detering, Bernd Mühlhaus, Stephen Kelley, Kyle Dean, Tusar Palauri, Juan Dent, George Liao, Daniel Ceperley, Jon T Hess, Stephen Totten, Wolfgang Fütterer, Matthias Grün, Phillip Diekmann, Ben Atakora, Ann Shatoff, Rob North, Bhavith C Achar, Marco Parri Empoli, Philipp Lenk, Charles-Jianye Chen, Keith Jeffery, Matt Godbolt, Honey Sukesan, bruce_lee_wayne, Silviu Ardelean, and Seeker.
Thanks, in particular, to Jon Hess, Lakshman, Christian Wittenhorst, Sherhy Pyton, Dendi Suhubdy, Sudhakar Belagurusamy, Richard Sargeant, Rusty Fleming, John Nebel, Mipko, Alicja Kaminska, Slavko Radman, and David Poole.
| My special thanks to Embarcadero |  |
| My special thanks to PVS-Studio |  |
| My special thanks to Tipi.build |  |
| My special thanks to Take Up Code |  |
| My special thanks to SHAVEDYAKS |
Modernes C++ GmbH
Modernes C++ Mentoring (English)
Rainer Grimm
Yalovastraße 20
72108 Rottenburg
Mail: schulung@ModernesCpp.de
Mentoring: www.ModernesCpp.org


