 https://www.modernescpp.com/wp-content/uploads/2024/07/TimelineCpp20BigFour.png
384
1113
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-08-05 09:02:392024-08-05 09:02:39Feature Testing Macros
https://www.modernescpp.com/wp-content/uploads/2024/07/TimelineCpp20BigFour.png
384
1113
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-08-05 09:02:392024-08-05 09:02:39Feature Testing Macros https://www.modernescpp.com/wp-content/uploads/2024/07/TimelineCpp20Interruption.png
321
912
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-07-15 08:43:252024-07-15 08:43:26Cooperative Interruption of a Thread in C++20: Callbacks
https://www.modernescpp.com/wp-content/uploads/2024/07/TimelineCpp20Interruption.png
321
912
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-07-15 08:43:252024-07-15 08:43:26Cooperative Interruption of a Thread in C++20: Callbacks https://www.modernescpp.com/wp-content/uploads/2021/02/TimelineCpp20Interruption.png
321
912
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-07-01 10:12:432024-07-01 10:12:44Cooperative Interruption of a Thread in C++20
https://www.modernescpp.com/wp-content/uploads/2021/02/TimelineCpp20Interruption.png
321
912
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-07-01 10:12:432024-07-01 10:12:44Cooperative Interruption of a Thread in C++20 https://www.modernescpp.com/wp-content/uploads/2024/03/TimelineCpp20CoreLanguage-1.png
411
960
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-06-24 09:36:102024-06-24 09:36:10Chrono: Input
https://www.modernescpp.com/wp-content/uploads/2024/03/TimelineCpp20CoreLanguage-1.png
411
960
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-06-24 09:36:102024-06-24 09:36:10Chrono: Input https://www.modernescpp.com/wp-content/uploads/2024/02/TimelineCpp20CoreLanguage.png
411
960
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-06-17 10:33:162024-06-17 10:33:16Chrono I/O: Unformatted and Formatted
https://www.modernescpp.com/wp-content/uploads/2024/02/TimelineCpp20CoreLanguage.png
411
960
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-05-20 10:09:522024-05-20 10:09:53Chrono I/O
https://www.modernescpp.com/wp-content/uploads/2024/03/TimelineCpp20CoreLanguage-1.png
411
960
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-05-13 09:39:112024-05-15 09:13:35Time Zones: Online Classes
https://www.modernescpp.com/wp-content/uploads/2024/02/TimelineCpp20CoreLanguage.png
411
960
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-06-17 10:33:162024-06-17 10:33:16Chrono I/O: Unformatted and Formatted
https://www.modernescpp.com/wp-content/uploads/2024/02/TimelineCpp20CoreLanguage.png
411
960
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-05-20 10:09:522024-05-20 10:09:53Chrono I/O
https://www.modernescpp.com/wp-content/uploads/2024/03/TimelineCpp20CoreLanguage-1.png
411
960
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-05-13 09:39:112024-05-15 09:13:35Time Zones: Online Classes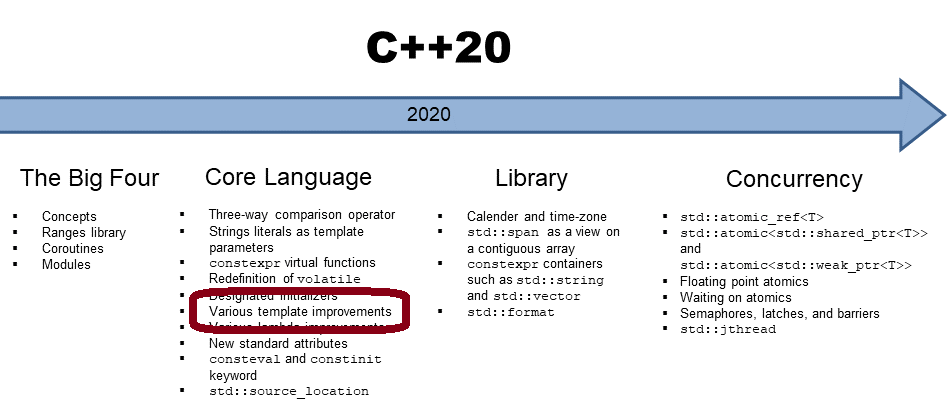 https://www.modernescpp.com/wp-content/uploads/2020/07/TimelineCpp20CoreLanguage.png
405
950
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-05-06 09:22:002024-05-06 09:22:00Time Zones: Details
https://www.modernescpp.com/wp-content/uploads/2020/07/TimelineCpp20CoreLanguage.png
405
950
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-05-06 09:22:002024-05-06 09:22:00Time Zones: Details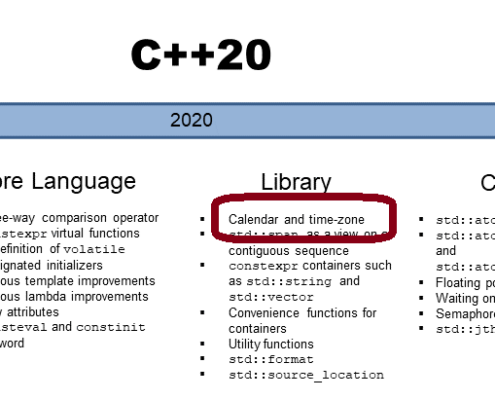 https://www.modernescpp.com/wp-content/uploads/2024/03/TimelineCpp20CoreLanguage.png
411
960
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-04-22 09:53:342024-04-22 09:53:34C++20: Query Calendar Dates and Ordinal Dates
https://www.modernescpp.com/wp-content/uploads/2024/03/TimelineCpp20CoreLanguage-1.png
411
960
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-04-15 09:20:172024-04-15 09:20:18C++20: Displaying and Checking Calendar Dates
https://www.modernescpp.com/wp-content/uploads/2024/03/TimelineCpp20CoreLanguage.png
411
960
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-04-22 09:53:342024-04-22 09:53:34C++20: Query Calendar Dates and Ordinal Dates
https://www.modernescpp.com/wp-content/uploads/2024/03/TimelineCpp20CoreLanguage-1.png
411
960
Rainer Grimm
https://www.modernescpp.com/wp-content/uploads/2023/02/logo_mcpp-blog-news2_287x52.png
Rainer Grimm2024-04-15 09:20:172024-04-15 09:20:18C++20: Displaying and Checking Calendar Dates